
Software-Projekt Praktikum im CPM Lab
Inhalt
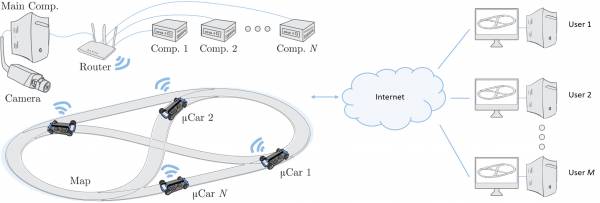
Das Cyber-Physical Mobility Lab kombiniert die Vorteile von Simulationen und Experimente in der realen Welt. So erlaubt es seinen Nutzer:innen, ein kostengünstiges aber trotzdem realitätsnahes Entwickeln im Kontext des autonomen und vernetzten Fahren. Hierfür stehen 20 Fahrzeuge im Maßstab 1:18 zur Verfügung, welche sich durch ein Indoor Positioning System (IPS) orientieren um in diversen Szenarien kooperativ fahren zu können.
Im Rahmen des CPM Remote Projekts wurde ein Fernzugriff auf das CPM Lab geschaffen. Außerdem bietet CPM Remote verschiedene Anwendungsbeispiele: In diesem Praktikum wird ein Packetlieferdienst mit diversen Herausforderungen implementiert und im Labor erprobt.
Voraussetzungen
- Inhalte der ersten drei Fachsemester, insbesondere Programmierung, Datenstrukturen & Algorithmen
- eigener Laptop
Unterrichtssprache
Deutsch
Organisation
Die regelmäßigen Termine während der Vorlesungszeit werden beim Kick-off Termin bekannt gegeben. Die Einladung zu diesem Termin wurde bereits versandt. Falls Sie angemeldet sind, aber noch keine Email bekommen haben, schreiben Sie bitte spp@embedded.rwth-aachen.de