
Inhaltsverzeichnis
eNav - Mobiles Navigationssystem für Elektrorollstühle
eNav
Das eNav Projekt am Lehrstuhl Informatik 11 der RWTH Aachen nutzt unterschiedliche Methoden und Ideen von embedded Software, um die Akkukapazität von Elektrorollstühlen sowohl besser festzustellen, als auch effektiver zu nutzen. Des Weiteren werden Barrieren aufgedeckt und können daher umfahren werden. Die hierbei resultierenden Ergebnisse sind oftmals leicht auf weitere Elektrofahrzeuge wie Pedelecs, Segways, etc im allgemeinen Sinne übertragbar.
Idee
Die ursprüngliche Idee für eNav ist dadurch entstanden, dass bisherige Navigationssysteme Personen in Elektrorollstühlen wenig unterstützen. Weder kann ein übliches Navigationssystem Auskunft darüber geben, wie steil die zu befahrende Strecke ist, noch ob man die geplante Route mit dem aktuellen Akkustand überhaupt bewältigen kann. Angelehnt an das Projekt Rollstuhlrouting kam die Idee, ein entsprechendes Navigationssystem zu spezifizieren. Aus der Tatsache heraus, dass die eingebaute Akkustandserfassung von Elektrorollstühlen ungenau und unzuverlässig ist, entstand die Motivation, ein entsprechendes System zu Verbesserung der Akkustandserfassung zu entwickeln. Zusätzlich sollen neue Technologien dazu verwendet werden, um durch die Betrachtung der topographischen Lage eine energieeffiziente Route zu berechnen. Der Benutzer hat bei der Nutzung des Naviagationssystem die Wahlmöglichkeit zwischen einer kürzesten und einer energieeffizientesten Route.
Projekt
Das Projekt gliedert sich in zwei Teile. Der erste Teil betrifft die Hardware am Elektrorollstuhl. Erfahrungsgemäß sind die Akkukapazitätsangaben von Elektrorollstühlen sehr ungenau. Hier wird versucht eine genauere Einschätzung der Akkukapazität zu erreichen. Dazu werden unterschiedliche Sensoren mit selbst erstellten Platinen fusioniert, welche anschließend mit weiteren Kenngrößen, wie Innenwiderstand des Akkus, eine möglichst genaue Aussage über die Akkukapazität machen können. Über ein Bluetooth-Modul auf dieser selbst erstellten Platine wird dann die genauere Akkukapazität an ein mobiles Endgerät übertragen (Android, iOS, J2ME, …).  Diese Übertragung zu einem mobilen Endgerät hat zwei Gründe. Zum einen muss auf diese Art und Weise nicht in die im Rollstuhl integrierte Anzeige eingegriffen werden (dabei könnte es zu Problemen mit dem TÜV kommen) und zum anderen werden diese Informationen im zweiten Teil des Projektes benötigt. Der zweite Teil des Projektes beschäftigt sich mit einem Navigationssystem für Elektrorollstühle. Dieses Navigationssystem kann nicht nur die schnellste und kürzeste Route berechnen, sondern zudem noch die effizienteste im Bezug auf den Stromverbrauch des Elektrorollstuhls. Zu der Berechnung des Energieverbrauchs ist damit begonnen worden die Steigung zu benutzen. Im weiteren Verlauf werden weitere Einflussfaktoren betrachtet. Durch die Wissen über den aktuellen Akkustand, teilt der Algorithmus dem Endbenutzer mit, ob er den Zielort erreichen kann. Falls der Akkustand für die Route nicht ausreicht, ist der Benutzer zu warnen, damit er nicht auf offener Straße hilflos stehen bleibt.
Diese Übertragung zu einem mobilen Endgerät hat zwei Gründe. Zum einen muss auf diese Art und Weise nicht in die im Rollstuhl integrierte Anzeige eingegriffen werden (dabei könnte es zu Problemen mit dem TÜV kommen) und zum anderen werden diese Informationen im zweiten Teil des Projektes benötigt. Der zweite Teil des Projektes beschäftigt sich mit einem Navigationssystem für Elektrorollstühle. Dieses Navigationssystem kann nicht nur die schnellste und kürzeste Route berechnen, sondern zudem noch die effizienteste im Bezug auf den Stromverbrauch des Elektrorollstuhls. Zu der Berechnung des Energieverbrauchs ist damit begonnen worden die Steigung zu benutzen. Im weiteren Verlauf werden weitere Einflussfaktoren betrachtet. Durch die Wissen über den aktuellen Akkustand, teilt der Algorithmus dem Endbenutzer mit, ob er den Zielort erreichen kann. Falls der Akkustand für die Route nicht ausreicht, ist der Benutzer zu warnen, damit er nicht auf offener Straße hilflos stehen bleibt.
eNav-App
Die eNav-App ist ein Navigationssystem für Elektrorollstühle, welche sich, neben der Barrierefreiheit auch die Energieeffizienz und den Komfort, beim Routen in Betracht zieht. Die nachfolgende Abbildung zeigt die wichtigsten Komponenten der App. 
Clients
Das eNav System ist über verschiedene Clients erreichbar und kann mit Smartphone oder Tablette als Navigations-App verwendet werden. Neben der Navigations-App besteht die Möglichkeit, eNav als Routenplaner zu nutzen. Das Bild auf der linken Seite zeigt den aktuellen Routenplaner. Und das Bild auf der rechten Seite zeigt Navigations-App.
 |  |
|
Server
Mit dem gewünschten Benutzerparametar greift der Server auf das Kartenmaterial zu und berechnet die gesamten Routen. Um die energieeffiziente Route zu berechnen, ist ein spezieller Algorithmus implementiert, der den energieeffizienten Weg berechnet. Am Ende wird den Benutzer die kürzeste und energieeffizienteste Route zur Verfügung gestellt. Zusätzlich zu der Routenberechnung wertet der Server die gesammelten Daten der Benutzer und verbessert somit das Kartenmaterial permanent.
Kartenmaterial
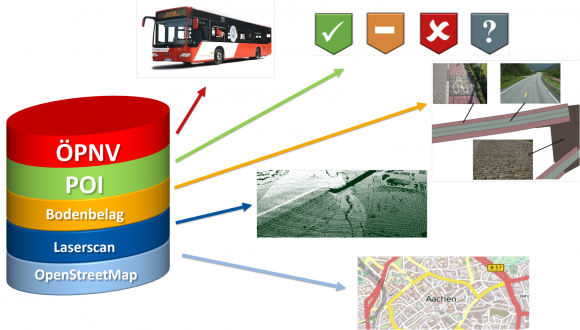
Um die Energieeffizienz und den Komfort im Betracht zu ziehen, musste für eNav eine spezielle Landkarte erstellt werden, welche zu den normalen Routeninformationen noch weitere Details, wie Steigung und Bodenbelag, beinhaltet. Die nachfolgende Punkte erläutern die verschiedenen Schichten der Karte:
- OpenStreetMap Die erste Schicht verwendet OpenStreetMap als Basis. Daraus werden das gesamte Straßennetz und Informationen über Barrierefreiheit entnommen. Letzteres ist entweder explizit vorhanden oder wird von anderen Informationen abgeleitet, wie z.B. Treppen oder Rampen.
- Laserscan Für die zweite Schicht hat die Bezirksregierung Köln Laserscan-Daten mit einer Genauigkeit von ±20 cm zur Verfügung gestellt[2]. Damit kann eine dreidimensionale Karte erstellt werden, und aus diesen 3D-Koordinaten wird die Steigung der Straße berechnet. Diese hat einen erheblichen Einfluss auf den Energieverbrauch eines Elektrorollstuhls[3].
- Bodenbelag Bodenbelaginformationen bilden die dritte Schicht. Diese werden durch die Informationen der Städteregion Aachen erweitert, denen entnommen werden kann, ob eine Straße aus Kopfsteinpflaster hat oder asphaltiert ist. Mit Hilfe freiwilliger Mitarbeiter (engl.: Crowdsourcing bzw. Volunteered geographic information (VGI) bzw. Contributed Geographical Information (CGI)) werden permanent Information über Bodenbelag gesammelt und in die Datenbank eingepflegt. Als Technik wird dabei die vertikale Beschleunigung des Beschleunigungssensors eines Smartphones verwendet. Anhand der Messwerte kann gefolgert werden, ob über Kopfsteinpflaster oder Asphalt gefahren wurde. Wird die Strecke mittels GPS lokalisiert, kann dieser dann ein Belag zugewiesen werden.
- POI In der letzten Schicht wird eine Verknüpfung zu Wheelmap.org hergestellt, damit der Benutzer beim Navigieren Information über die Barrierefreiheit von Gebäuden erhalten kann. Visuell werden die Ziele (engl. „point of interest“ oder POI) grün (barrierefrei), orange (beschränkt barrierefrei), rot (nicht barrierefrei) oder grau (unbekannt) angezeigt.
- ÖPNV Durch die direkte Verbindung von eNav und IVU hat eNav Echtzeit Information über alle Busverbindungen, so dass der Benutzer zu jeder Zeit informiert werden kann, ob sich ein Bus für ihn eignet. Das Routen, was damit verbunden ist, nennt sich Multimodales Dynamisches Routen.

Crowdsourcing
| Barrierenmelder ist für eNav deshalb wichtig, da trotz vieler Information im OSM über Barrieren, nicht alle Barrieren erfast sind. Aus diesem Grund verwendet eNav zwei Methoden, um den Informationsgehalt zu steigern. Zum einen wird mit Hilfe von Volunteered Geographic Information (VGI) den Benutzer die Möglichkeit gegeben, über die App eine Barriere zu melden. Zum anderen wird mit Hilfe von Contributed Geographic Information (CGI) anhand des Fahrprofils versucht eine Barriere zu erkennen. Z.B. wenn 10 Benutzer an einer Stelle von der geplanten Route abweichen, ist es ein Indikator dafür, dass an dieser Stelle eine Barriere sein kann. So kann der Server mit Hilfe spezieller Verfahren die Barriere erkennen und umgehen. (Siehe Bild recht!)
Bei der Bodenbelagerkennung wird ein weiteres Mal CGI verwendet. Dabei wird während der ganzen Fahrt die Z-Achsenbeschleunigung des Smartphone gemessen. Da die Ausschläge bei Kopfsteinpflaster viel stärker als bei Asphalt sind, lassen sie so die unterschiedlichen Belege zu ordnen. Dabei wurde für das eNav System ein spezielles Verfahren entwickelt, mit dem sich das Smartphone automatisch kalibriert. (Siehe Bild unten!) |
 |

Rentabilität
| Tests haben ergeben, dass ca. in der Hälfte aller Fälle eine Route existiert, die effizienter als die kürzeste Route ist. Dieser Ergebnisse untermauern die Relevanz des Projektes und lassen vermuten, dass für andere Elektrofahrzeuge eine ähnliche Beobachtung zu erwarten ist. |
 |
Chronik
| Jahr | Fortschritt |
|---|---|
| 2010 | Entwicklung einer Hardwareplatine zur Messung des Stromverbrauchs |
| 2011 | Entwicklung eines Navigationssystems für Elektrorollstühle |
| 2012 | Einbeziehung der Höhendaten aus OpenStreetMap (OSM) (Schwäche: Informationen lückenhaft und ungenau) |
| Anreicherung der OSM Daten durch Laserscan-Daten (vollständig, auf 10cm genau) | |
| 2013 | Integration des Bodenbelags und Anpassung der Verbrauchsfunktion |
| Evaluierung des gesamten Systems | |
| 2014 | Entwicklung einer neuen barrierefreien GUI |
| 2015 | Entwicklung und Integration des Bodenbelagsdetektor |
| Entwicklung und Integration des Barrierendetektor | |
| 2016 | Integration von POI's |
| 2017 | Entwicklung und Integration des Multimodales Dynamisches Routen |
Status
Der Status des Projektes ist dynamisch und davon abhängig, wie viele Abschlussarbeiter gerade daran arbeiten und welche neuen und durchaus spannenden Erkenntnisse gemacht werden. Zurzeit ist die Integration der Bodeninformationen vollständig abgeschlossen worden, jedoch sind die dafür verfügbaren Daten sowohl über die Bodenbeläge als auch über die Steigung nur zu Forschungszwecken nutzbar. Parallel dazu beschäftigt sich eine Abschlussarbeit mit der Implementierung einer neuen Benutzerschnittstelle.
Trage bei zu einer neuen Generation von Fahrassistenz!!!
Das Projekt bietet nahezu grenzenlose Erweiterungsmöglichkeiten und einen Einstieg in unterschiedliche Schwerpunkte. Für Elektrotechniker oder Physiker gibt es Anwendungsbereiche im Bereich der Akkuforschung. Informatik und Mathematiker können einen großen Beitrag in der Entwicklung des Algorithmus und in der Optimierung der Verbrauchsfunktion leisten. Auch für andere Fachrichtungen wie z.B. aus dem sozialen gibt es Anwendungsmöglichkeiten wie beispielsweise eine Erforschung der Mensch-Maschine-Interaktion, etc.
Kontakt
Hast du Interessen daran das Projekt zu unterstützen oder Erweiterungsvorschläge, dann melde dich bei: