
Inhaltsverzeichnis
Cyber-Physical Mobility Group
For Theses and Open Positions please click here.
Team
Completed PhD
- Dr.-Ing. Maximilian Kloock
- Dr.-Ing. Alexandru Kampmann

Follow us on
Research Summary
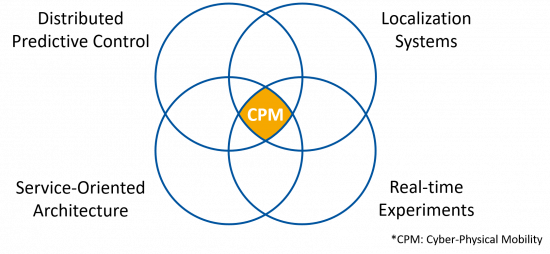
Cyber-physical mobility systems represent multi-agent systems that share common goals. Our research in this field includes distributed predictive control, service-oriented architectures, localization systems, and their applications to connected and automated vehicles (CAVs), ultimately contributing to the enhancement of safety and efficiency in these systems.
We conduct various projects in this research area funded by public organizations and industrial partners.
With our research, we contribute to the Future Mobility Center. We are also an active member of the Mobility & Transport Engineering profile area.
Publications
The latest list of our publications can be found on Google Scholar page.
Research Projects
Cyber-Physical Mobility Lab (multiple funding)
As of 01.03.2024, the CPM Lab moved with Dr.-Ing. Bassam Alrifaee to the University of the Bundeswehr Munich.
The CPM Lab website: cpm.embedded.rwth-aachen.de.
Service-Oriented Model-based Control (funded by the DFG)
As of 01.03.2024, this project moved with Dr.-Ing. Bassam Alrifaee to the University of the Bundeswehr Munich.
Digital Twin of the Road System (funded by the DFG)
The Chair of Computer Science 11 is part of the new Collaborative Research Center / Transregio (SFB/TRR) 339 of the German Research Foundation (DFG). The Collaborative Research Project investigates the „Road of the Future“ and is named: »Digital Twin of the Road System - Physical-Informational Representation of Future Road System«.
Research groups from TU Dresden and RWTH Aachen University are researching in collaboration of civil engineering, computer science, and mechanical engineering. The goal of the research area is the creation and exploration of a digital twin of the road system, thus laying the foundation for the analysis and optimization of the future road system. The main focus of this research is the intelligent, gentle, and sustainable use of road infrastructure.
Our task as the Chair of Embedded Software is primarily a sensor data fusion that combines data from different sources. We mainly focus on the inclusion of data from a sensitive road surface layer.
More Information about the project: Project Website

Copyright SFB/TRR 339
Contact: Simon Schäfer, M.Sc. RWTH
Harmonizing Mobility (funded by the BMDV)
Two German universities and two industrial companies interdisciplinary collaborate in the HarMobi (Harmonizing Mobility) project. HarMobi aims at researching a new basis for evaluating conflicts between different road users. We will use sensor and traffic flow data from bicycles, e-scooters, and cars to determine the behavior of road users and the influence of the road infrastructure. This novel data will be fed into a learning system to better assess safety impacts for future traffic developments and planning.
The predecessor project GefahrstelleRAD investigated the identification of cycling-specific danger spots in public roads for maps and navigation applications, see Gefahrenstellen.
In HarMobi, our group will design the algorithms for data acquisition, critical situation assessment, and map matching. Additionally, we will research conflict causes and create a prognosis model.
More Information about the project: HarMobi
Contact: Jianye Xu, M.Sc. RWTH, Simon Schäfer, M.Sc. RWTH
AUTOtech.agil (funded by the BMBF)
Leading German universities in the automotive sector and selected researchers from industry jointly research in the AUTOtech.agil project. The goal of AUTOtech.agil is to create an open architecture for the mobility system of the future. A particular focus is on the standardization of interfaces, updatability, and expandability of functional building blocks. Future mobility is electric, connected, and automated. This will lead to a comprehensive transformation of road traffic as we know it today. This is accompanied not only by great opportunities for novel mobility and transportation concepts but also by improvements in road safety and quality of life. This transformation requires agile approaches based on innovative software and hardware architectures that also enable machine learning methods.
In the predecessor project UNICARagil, our Chair was primarily responsible for the design and implementation of the digital architecture. Our chair was in charge of developing the Automotive Service-Oriented Software Architecture (ASOA) and coordinated the realization of the UNICARagil cloud infrastructure.
In AUTOtech.agil, our tasks are
- Researching scalable ASOA
- Enabling service-oriented diagnosis
- Integrating ASOA into industrial platforms and methods
- Creating tools for service-oriented software development
- Collaborating with interdisciplinary project partners
More Information about the project
 © Institut für Kraftfahrzeuge (ika) - RWTH Aachen University / Lutz Eckstein
© Institut für Kraftfahrzeuge (ika) - RWTH Aachen University / Lutz Eckstein
Contact: David Philipp Klüner, M.Sc. RWTH, Julius Kahle, M.Sc. RWTH, Marius Molz, M.Sc. RWTH, Dr.-Ing. Alexandru Kampmann
Teaching
Control and Perception in Networked and Autonomous Vehicles
We offer the course Control and Perception in Networked and Autonomous Vehicles since the winter term 2019/2020. We designed it for master's students of computer science, automation engineering, and computational engineering science. It combines theory with practical exercises in the CPM Lab. The course materials are available here.
Contact: Simon Schäfer, M.Sc. RWTH
Practical Course
For bachelor's students, we offer a practical course software project in the CPM Lab since the winter term 2019/2020.

Contact: Jianye Xu, M.Sc. RWTH
Team GalaXIs
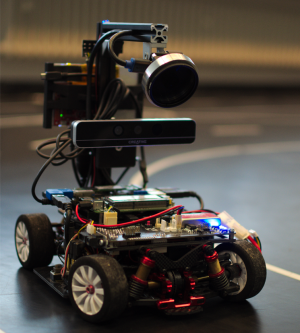
Since 2008, our student group Team GalaXIs implements perception and control algorithms on an autonomous scaled vehicle in order to participate in competitions.
More information can be found at galaxis.rwth-aachen.de.
We are always looking for motivated and ambitious students to join Team GalaXIs.
Contact: David Philipp Klüner, M.Sc. RWTH
Theses and Open Positions
Instructions for Applications
Prepare your application as a single PDF, not bigger than 5MB. Please include
- concise cover letter
- curriculum vitae
- transcript of records (Bachelor and Master if applicable)
- certificates
Please send your application via e-mail with this subject line: Application CPM - Master Thesis/Bachelor Thesis/Student Assistant/PhD Position
Please note that it can take up to two weeks for us to reply to applications.
PhD Positions
Current open PhD positions can be found here.
Theses and Student Positions
We are always looking for motivated and ambitious students to join our team. We offer theses and student assistant positions in the following areas
Additionally, initiative applications for theses and student assistant positions are very welcome. You can send your application to the corresponding member of the group, or all members: cpm-info[at]embedded[dot]rwth-aachen.de
Participation in Committees
Our group contributes to different national and international committees, e.g., to
- Mobility & Transport Engineering profile area of RWTH Aachen University
- Examination board of the Master's study program Automation Engineering of RWTH Aachen University
- MATLAB-AG of RWTH Aachen University
We also contribute to the organization of meetings and conferences in our research area, e.g., by organizing special sessions.
Finished Projects
CoInCar (funded by the DFG)
The DFG priority program CoInCar (Cooperative Interacting Automobiles) gathers an interdisciplinary group of researchers to develop a system-theoretical framework for cooperative traffic involving autonomous automobiles. The program promotes research on several topics including
- Cooperative maneuver and trajectory planning
- Situation prediction
- Cooperative perception
- Data and information base
- System ergonomics
- Cross-cutting issues
We are working on two subprojects of the priority program, namely AutoKnigge and GROKO-Plan. Our subprojects belong to the first research area of cooperative maneuver and trajectory planning. In both subprojects, we focus on distributed decision-making and safety-verification of interacting vehicles while meeting real-time constraints of traffic.
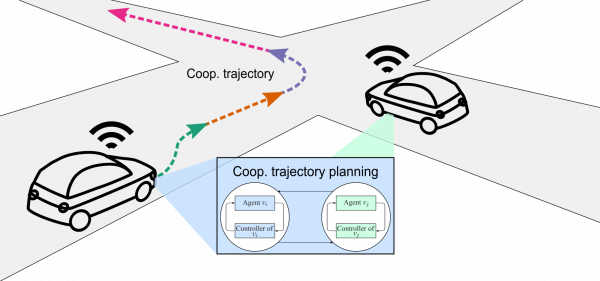
The figure sketches distributed trajectory planning, where two vehicles communicate necessary data so that each vehicle can plan a collision-free trajectory. Major challenges of distributed trajectory planning are (I) the dependability of planned trajectories, (II) real-time compliance of the optimizer on board the vehicles, and (III) a realizable communication effort between vehicles. The first challenge arises since conflict-free trajectories are mandatory. The second challenge is due to high-dimensional non-convex optimization problems, as they occur when many road users must be considered. The third challenge is caused by the interaction, i.e., solving the distributed optimization problem on one vehicle while parts of the optimization problems of other road users must be exchanged.
To meet these challenges, we develop novel methods for networked trajectory planning that reduce the computation time and communications requirements while enhancing the feasibility and quality of control.
GROKO-Plan
In the subproject GROKO-Plan (Graph-based, Optimal and Cooperative Trajectory Planning for Interacting Automobiles), we research trajectory planning methods for connected vehicles using graph-based methods with our project partner from Saarland University. Networked planning is characterized by a receding horizon approach in discrete planning space. Maneuver automata model the dynamics and couplings of agents. We use graph search algorithms and hybrid optimization to find trajectories in the coupled automata. We focus on developing novel methods for distributed computations in order to reduce the complexity of the planning problem.
Contact: Patrick Scheffe, M.Sc. RWTH
AutoKnigge
In the subproject
AutoKnigge (Modeling, Evaluation, and Verification of Cooperative Interacting Automobiles), we research trajectory planning methods for connected vehicles and methods for safety-verification of the vehicles' motion with our project partners of the Institute for Automotive Engineering (ika) and the Chair of Computer Science 3 - Software Engineering (i3). We plan trajectories using Networked Model Predictive Control (Net-MPC). The planning algorithms use a receding horizon approach in a continuous planning space. The cost function and constraints of the planning problem model the coupling of agents. We research novel methods for distributed MPC for reducing the complexity of the planning problem. We verify the resulting trajectories using formal methods.
Contact: Julius Beerwerth, M.Sc. RWTH
UNICARagil (funded by the BMBF)
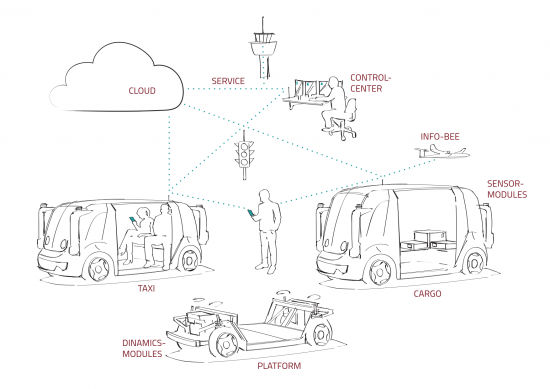
Germany's leading universities in the field of automated vehicles have joined forces with selected specialists from industry in the BMBF-funded project UNICARagil to rethink automated vehicles and their architectures. UNICARagil researches disruptive, modular, and agile concepts in hardware and software architecture for fully automated and driverless vehicles.
The modular vehicle concept consists of a driving platform and add-on modules, which build the basis for the UNICARagil-vehicles. The UNICARagil-vehicles can be flexibly adapted to a wide range of applications in passenger transport or logistics.
The RWTH Aachen University is involved in the project with the Institute of Automotive Engineering (ika), the Institute and Chair of Flight System Dynamics (FSD), and the Chair of Computer Science 11 - Embedded Software (i11). The i11 is mainly responsible for the conceptualization and implementation of a service-oriented software architecture, as well as an architecture of cloud-based services.
Dr.-Ing. Bassam Alrifaee is responsible for the coordination of the digital architecture. Dr.-Ing. Alexandru Kampmann and Armin Mokhtarian, M.Sc. RWTH are responsible for the conceptualization and implementation of the service-oriented software architecture and the architecture of cloud-based services.
One outcome of this project is embeddedRTPS, a portable DDS implementation for embedded systems that is based on FreeRTOS and lightweightIP. It is available under the MIT license on Github.
Read more on the service-oriented software architecture.
Read more on the architecture of cloud-based services.
Contact: David Philipp Klüner, M.Sc. RWTH, Dr.-Ing. Alexandru Kampmann, Armin Mokhtarian, M.Sc. RWTH
Infrastructure-based Localization
Global Navigation Satellite Systems (GNSS), such as GPS or Galileo, can suffer from performance degradation in urban areas, caused by non-line-of-sight or multipath propagation. Therefore, autonomous vehicles additionally use localization algorithms based on heuristic features extracted from sensor data to alleviate the aforementioned problems. While these algorithms tend to perform better in urban areas than GNSS, these approaches have their drawbacks. Even state-of-the-art approaches suffer from issues with long-term stability, scarcity, or ambiguity of the features. This project pursues the development of a low-cost localization system that is aided by infrastructure-based features to overcome the problems of both approaches.
Contact: Dr.-Ing. Alexandru Kampmann
Bicycle Safety
Especially in recent years, the number of bicycles on the road is increasing. In contrast to all other traffic participants, the number of accidents for bicycles is increasing as well. While multiple active safety systems exist for cars, such systems are rare for bicycles and pedelecs. The Bicycle Safety project aimed to develop a low-cost and portable active safety system for bicycles. This system shall warn riders before a potentially dangerous situation occurs. Possible dangerous situations are sharp corners and changing road surfaces.
eNav
The project eNav aimed at the development of a navigation system for disabled electric wheelchair users. For a selected navigation goal, eNav computes a route that
- avoids inaccessible routes for an electric wheelchair
- avoids uncomfortable routes for the electric wheelchair user
- considers the state of charge of the battery
- offers a multi-modal route by combining rides using the electric wheelchair with rides using public transportation systems.
The system can be transferred to the research of other electric vehicles, e.g., e-bikes. Read more on the project website.
Statistical Road Surface Model for Improved Positioning
This project pursues the development of a state-of-the-art GNSS/INS, which receives input from a Statistical Absolute Position Estimator (SAPE) for an additional update step. SAPE uses features of the road surface to determine the absolute location of the vehicle. More specifically, Hidden Markov Models (HMM) are used for the classification of inputs from acceleration sensors. The project has been implemented using a Pedelec.